
BOSCH และ TomTom พัฒนาแผนที่ซึ่งใช้สัญญาณเรดาร์สำหรับระบบขับเคลื่อนอัตโนมัติ
Press Release
● บ๊อช จับมือกับ ทอมทอม บริษัทผู้ให้บริการข้อมูลจราจรและแผนที่สัญชาติดัตช์ พัฒนาแผนที่ความละเอียดสูง รองรับระบบขับเคลื่อนอัตโนมัติ โดยบ๊อชซึ่งเป็นหนึ่งในผู้ผลิตเทคโนโลยีและการบริการด้านนี้ นับเป็นรายแรกของโลกที่สามารถสร้างเลเยอร์ระบุตำแหน่งเข้าไปโดยใช้สัญญาณเรดาร์
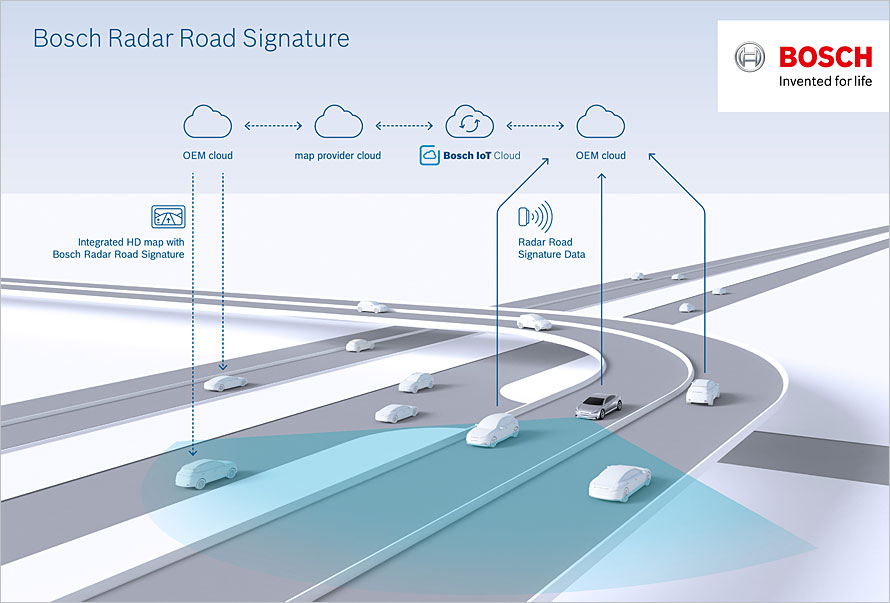
● ระบบระบุตำแหน่งด้วยเรดาร์ หรือ “Radar road signature” ของบ๊อช เกิดขึ้นโดยอาศัยข้อมูลจุดสะท้อนหลายพันล้านจุด ณ ตำแหน่งที่สัญญาณเรดาร์ตกกระทบ อาทิ แนวรั้วกั้นถนน หรือสัญญาณจราจรต่างๆ และทำการจำลองเส้นทางบนถนนขึ้นมา รถยนต์ที่ใช้งานระบบขับเคลื่อนอัตโนมัติจึงสามารถใช้แผนที่นี้กำหนดตำแหน่งบนท้องถนนได้อย่างแม่นยำ ด้วยพิกัดที่ละเอียดเป็นหน่วยเซนติเมตร
● “ระบบเรดาร์ โรด ซิกเนเจอร์ นับเป็นก้าวย่างครั้งสำคัญบนเส้นทางพัฒนาสู่การขับขี่ด้วยระบบขับเคลื่อนอัตโนมัติอย่างแท้จริง เพราะช่วยให้เคลื่อนที่ไปยังตำแหน่งที่ถูกต้องแม่นยำได้ตลอดเวลา” ดร. เดิร์ค โฮไฮเซล (Dirk Hoheisel) คณะกรรมการบริหารของบ๊อช กล่าว
● นอกจากนี้ ข้อได้เปรียบของระบบเรดาร์ โรด ซิกเนเจอร์ คือ ประสิทธิภาพของระบบ ซึ่งต่างจากแผนที่ทั่วไปที่ใช้ข้อมูลแบบวิดีโอในการระบุตำแหน่งของยานยนต์ และระบบเรดาร์ โรด ซิกเนเจอร์ ยังทำงานได้ดีในเวลากลางคืน หรือในภาวะที่ทัศนวิสัยต่ำ นอกจากนี้ ระบบเรดาร์ โรด ซิกเนเจอร์ ยังมีอัตราการส่งข้อมูลไปยังระบบคลาวด์เพียง 5 กิโลไบต์ต่อระยะทางหนึ่งกิโลเมตร ซึ่งหากใช้แผนที่แบบวิดีโอ ปริมาณข้อมูลจะเพิ่มเป็น 2 เท่า ทั้งนี้มีการคาดการณ์ว่าภายในปี 2020 จะมียานยนต์รุ่นแรกที่สามารถให้ข้อมูลสำหรับระบบเรดาร์ โรด ซิกเนเจอร์ ได้ในยุโรปและสหรัฐอเมริกา
● “เรายินดีเป็นอย่างยิ่งที่สามารถเสริมข้อมูลระบุตำแหน่งเข้าไปในรูปแบบของระบบเรดาร์ โรด ซิกเนเจอร์ ที่เราพัฒนากับทางบ๊อชได้เป็นผลสำเร็จ ซึ่งจะช่วยให้ยานยนต์ขับเคลื่อนอัตโนมัติสามารถเคลื่อนที่ไปยังตำแหน่งที่แม่นยำ ด้วยประสิทธิภาพที่สูงขึ้นอย่างมีนัยสำคัญ” มร. แอโรลด์ กอดด์จิน (Harold Goddijn) ประธานเจ้าหน้าที่บริหารของทอมทอมกล่าว
● บ๊อชและทอมทอม ร่วมกันพัฒนาระบบเรดาร์ โรด ซิกเนเจอร์ โดยนำข้อมูลไปผนวกกับแผนที่ความละเอียดสูงของทอมทอมตั้งแต่ช่วงเดือนกรกฎาคม 2015 ซึ่งปัจจุบันนั้น บ๊อชเป็นบริษัทชั้นนำที่มีเทคโนโลยีระบบตรวจจับด้วยเรดาร์ที่ใช้เทคโนโลยีระดับ 77 กิกะเฮิร์ตซ์ และมีระยะตรวจจับสูงสุดถึง 250 เมตร ซึ่งเมื่อเทียบกับการตรวจจับด้วยระบบวิดีโอแบบเดิมๆ นั้น รัศมีในการตรวจจับจะอยู่ที่ 150 เมตรเท่านั้น สิ่งที่ท้าทายคือ การมองหาวิธีปรับระบบเรดาร์ที่ใช้กันอยู่ให้เข้ากับระบบนี้
● ในกรณีที่ใช้ระบบตรวจจับเรดาร์ควบคู่กับระบบช่วยเหลือผู้ขับ เช่น ระบบเบรกฉุกเฉินอัตโนมัติ หรือระบบควบคุมความเร็วแบบแปรผันอัตโนมัติ (Adaptive Cruise Control) อุปกรณ์ตรวจจับจะทำการค้นหาวัตถุที่ “กำลังเคลื่อนที่” แต่ในกรณีของการสร้างเรดาร์ โรด ซิกเนเจอร์ จะต้องสามารถตรวจจับวัตถุที่อยู่นิ่งได้ด้วย หมายความว่าต้องมีการปรับอุปกรณ์ตรวจจับใหม่ ดังนั้นอุปกรณ์ตรวจจับระบบเรดาร์ของบ๊อชในรุ่นต่อๆ ไปจึงต้องสามารถให้ข้อมูลที่จำเป็นต่อระบบเรดาร์ โรด ซิกเนเจอร์ ได้
● “รถยนต์ที่จะออกสู่ตลาดในอีกหลายปีข้างหน้าพร้อมฟังก์ชั่นช่วยเหลือผู้ขับสำหรับยุคหน้า จะเป็นตัวขับเคลื่อนแผนที่ที่ทำขึ้นเพื่อรองรับยานยนต์ขับเคลื่อนอัตโนมัติแห่งอนาคต” มร. โฮไฮเซล กล่าว
รถยนต์นับล้านคัน จะช่วยอัพเดทข้อมูลแผนที่ตลอดเวลา
● แผนที่ความละเอียดสูงเป็นสิ่งจำเป็นสำหรับการระบบขับเคลื่อนอัตโนมัติ เพราะสามารถแสดงข้อมูลนอกบริเวณการตรวจจับของเซนเซอร์ได้ ต่างจากแผนที่ (Navigator System) ซึ่งเป็นเครื่องมือนำทางในปัจจุบัน เพราะแผนที่เหล่านี้ประกอบไปด้วยข้อมูลหลายเลเยอร์ที่ทับซ้อนกัน:
● ชั้นข้อมูลระบุตำแหน่ง (Localization Layer): ยานยนต์ขับเคลื่อนอัตโนมัติสามารถเคลื่อนที่ไปตามตำแหน่งของช่องทางถนนได้โดยใช้ข้อมูลชั้นนี้ที่ประกอบด้วย ระบบเรดาร์ โรด ซิกเนเจอร์ ของบ๊อช เสริมด้วยแผนที่แสดงตำแหน่งแบบวิดีโอ มีการเปรียบเทียบข้อมูลวัตถุที่จับได้จากเซนเซอร์รายรอบ กับข้อมูลตำแหน่งที่มีในชั้นนี้ ซึ่งสุดท้ายจะช่วยให้รถยนต์สามารถเคลื่อนที่ไปในตำแหน่งที่สัมพันธ์กับวัตถุเหล่านี้ได้
● ชั้นข้อมูลการวางแผน (Planning layer): ข้อมูลชั้นนี้ใช้ในการคำนวณเพื่อการบังคับรถในระหว่างการขับขี่อัตโนมัติ (หรือการวางแผนการเคลื่อนที่) โดยให้ข้อมูลด้านเส้นทางถนน สัญญาณจราจรต่าง ๆ และขีดจำกัดความเร็ว รวมทั้งทางโค้งและทางลาดชันต่าง ๆ ดังนั้น ยานยนต์ขับเคลื่อนอัตโนมัติจึงสามารถใช้ข้อมูลในชั้นนี้ในกรณีเช่น การตัดสินใจว่าควรจะเปลี่ยนช่องทางเมื่อไร
● ชั้นข้อมูลที่มีการเปลี่ยนแปลง (Dynamic layer): ข้อมูลเกี่ยวกับสภาพการจราจรที่มีการเปลี่ยนแปลงได้ตลอดอย่างรวดเร็ว เช่น ภาวะจราจรติดขัด งานก่อสร้างและสิ่งกีดขวางอันตราย หรือที่ว่างสำหรับจอดรถ ล้วนเป็นข้อมูลที่บันทึกไว้ในชั้นข้อมูลที่มีการเปลี่ยนแปลง
● ดังนั้น ข้อมูลแต่ละเลเยอร์สำหรับแผนที่ความละเอียดสูงเพื่อระบบขับเคลื่อนอัตโนมัติ จึงต้องปรับปรุงข้อมูลให้เป็นปัจจุบันอยู่เสมอ โดยเฉพาะชั้นข้อมูลที่มีการเปลี่ยนแปลงอาจต้องอัพเดทแบบเรียลไทม์ “ไม่นานนี้ เราคาดการณ์ว่าคงต้องใช้กองทัพยานยนต์จำนวนมากสำหรับการตรวจสอบสภาพบนช่องทางด่วนต่างๆ ในยุโรป อเมริกาเหนือ และเอเชียแปซิฟิก โดยหนึ่งกองทัพรถน่าจะมีรถยนต์ประมาณร่วมล้านคัน เพื่อให้แผนที่ความละเอียดสูงของเรามีข้อมูลที่เป็นปัจจุบัน” มร. โฮไฮเซล ให้ความเห็น
● ข้อมูลล่าสุดสำหรับแต่ละเลเยอร์ จะมาจากตัวเซนเซอร์ที่ติดตั้งในรถยนต์ขณะขับเคลื่อน กล่องระบบสื่อสาร อาทิ หน่วยควบคุมการเชื่อมต่อ (Connectivity Control Unit) ของบ๊อช จะส่งข้อมูลตัวเซนเซอร์ผ่านระบบเรดาร์จากตัวรถไปยังฐานข้อมูลบนคลาวด์ของผู้ผลิต แล้วส่งต่อไปยังระบบคลาวด์สำหรับ IoT ของบ๊อช และบ๊อชจะประมวลข้อมูลเหล่านี้มาสร้างสัญลักษณ์บนถนนกับระบบเรดาร์ที่สามารถใช้ร่วมกับแผนที่รูปแบบเดิมได้ ขณะที่ทอมทอมรับผิดชอบการผนวกระบบเรดาร์ โรด ซิกเนเจอร์ เข้าไปในแผนที่โดยรวมก่อนจะเผยแพร่ต่อไป ●
เกี่ยวกับบ๊อชในประเทศไทย
● บ๊อชเริ่มเข้ามามีบทบาทในประเทศไทยตั้งแต่ปี พ.ศ. 2466 ปัจจุบัน บ๊อชสร้างความหลากหลายในธุรกิจ 4 ด้าน ได้แก่ โซลูชั่นส์แห่งการขับเคลื่อน เทคโนโลยีอุตสาหกรรม สินค้าอุปโภคบริโภค และเทคโนโลยีพลังงานและอาคาร บริษัทมีโรงงานผลิตในธุรกิจโซลูชั่นส์แห่งการขับเคลื่อน 3 แห่ง พร้อมทั้งศูนย์วิจัยและพัฒนา อีกทั้งสำนักงานขายและศูนย์บริการสำหรับอุปกรณ์ไฮดรอลิกและเครื่องจักรในจังหวัดระยอง และสายการผลิตโซลูชั่นส์และการบริการส่วนเครื่องจักรเพื่อบรรจุภัณฑ์ในจังหวัดชลบุรี
● ในปีที่ผ่านมา บ๊อชในประเทศไทยมียอดขายถึง 11.9 พันล้านบาท (305 ล้านยูโร) และมีพนักงานมากกว่า 1,200 คน สนใจข้อมูลเพิ่มเติมเกี่ยวกับธุรกิจบ๊อชในประเทศไทย เชิญได้ที่ www.bosch.co.th และ facebook.com/BoschThailand ●

